How does this “tracking” work, anyways? Let’s take a walk through it! The following sections are meant to be a qualitative overview of the ATLAS track reconstruction process. For more technical details, please see (…) Additionally, look for the links to the relevant algorithms on Gitlab, included where appropriate. Feel free to skip past this section in the sidebar on the left if you are just looking for the tutorial proper.
Roughly, ATLAS tracking is done first “inside out” and then “outside in”, with respect to the components of the inner detector like so:
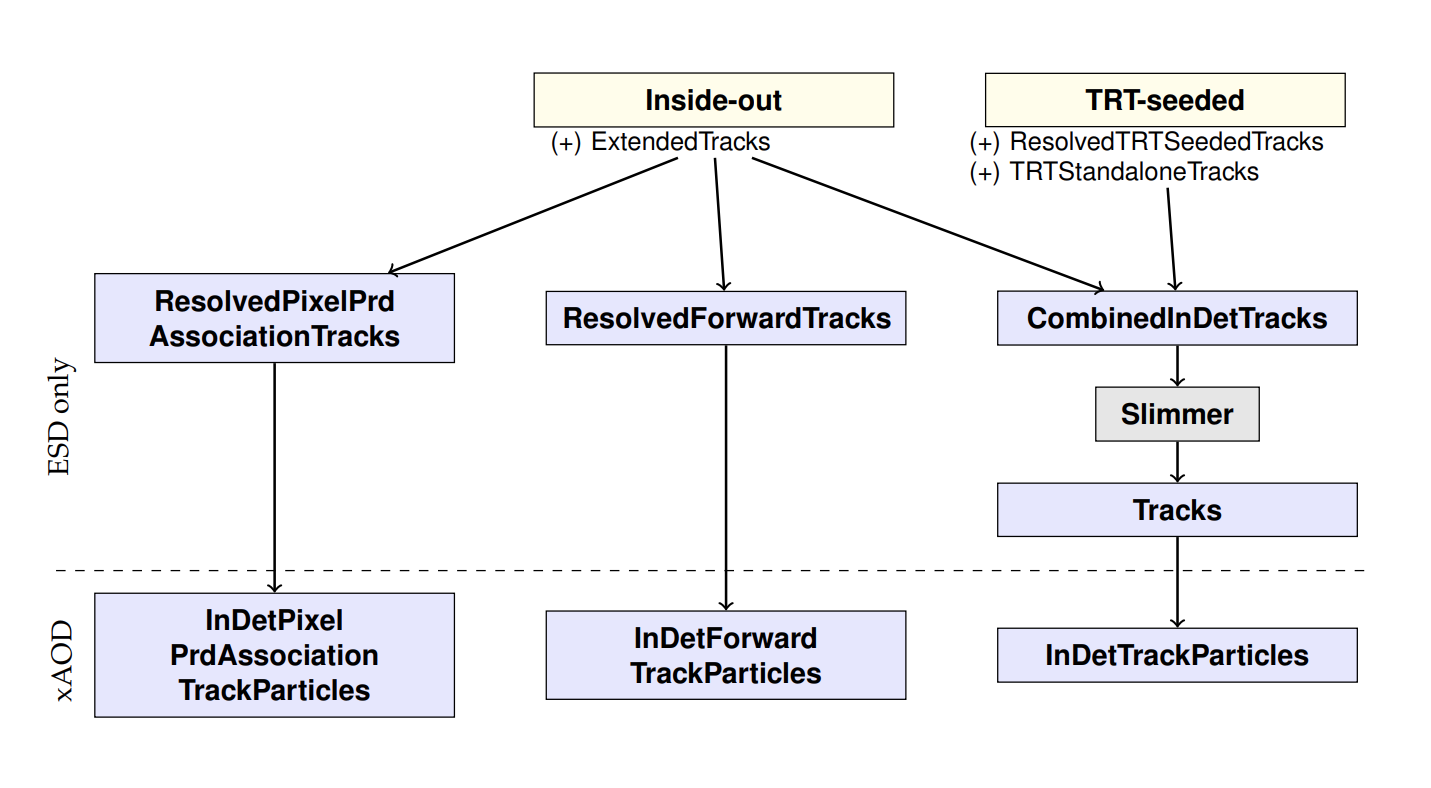
Hits (real or simulated) in the inner detector are reconstructed into tracks through this ordered execution of algorithms. The end result is a selection of track collections which are then available for physics analysis. These are grouped based on which parts of the track reconstruction process are included, as seen in the diagram below:
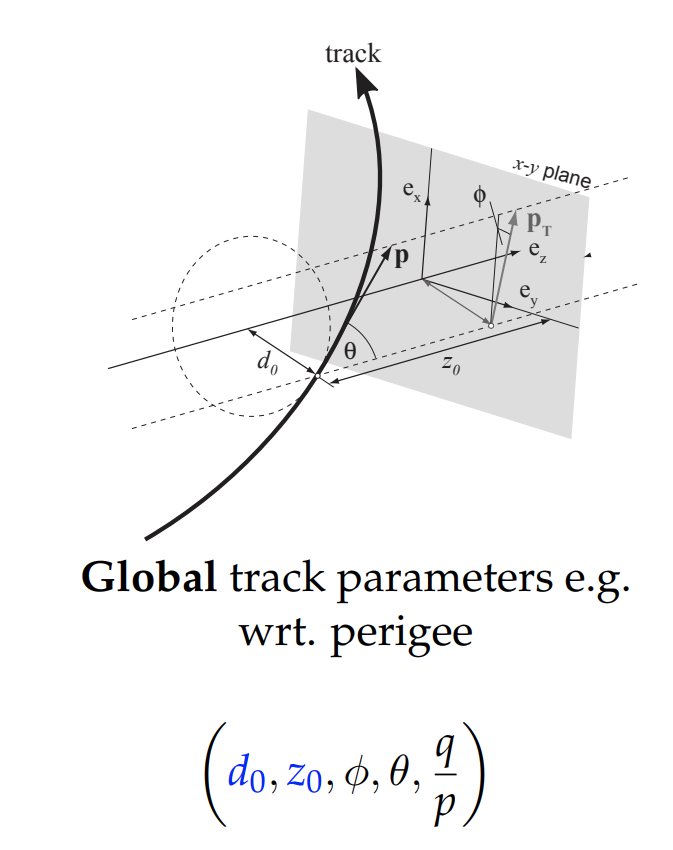
Tracks are described by five parameters and a reference point, using a perigee representation. Two of the parameters are the transverse and longitudinal impact parameters d0 and z0, defined as the transverse and longitudinal distances of the single point of closest approach transverse to the reference point. The other three parameters are the azimuthal angle φ and the polar angle θ of the track momentum at the reference point and the ratio q/p of the charge of the reconstructed track divided by the magnitude of its momentum. The reference point used is the average position of the pp interactions (beamspot position).
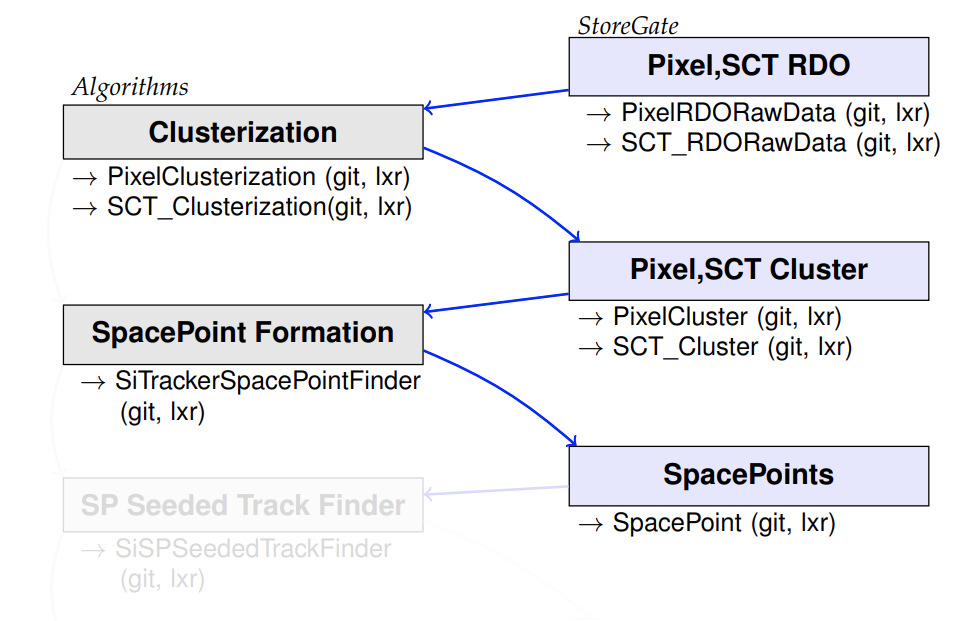
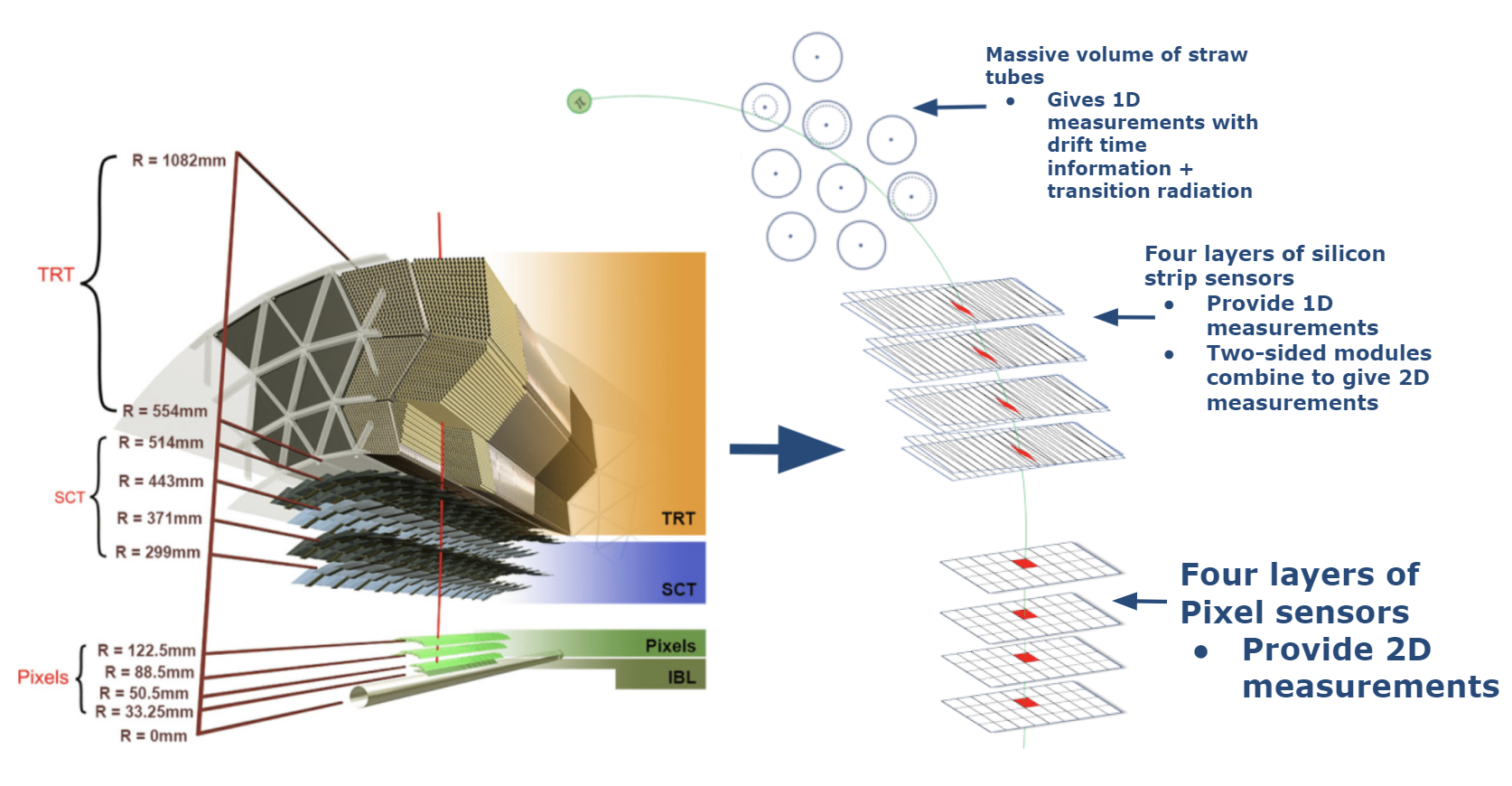
The process begins with a pre-processing stage, where signals from adjacent channels in the Pixel and SCT subdetector are combined into clusters which are interpreted as deposits left by individual traversing charged particles. Pairs of one-dimensional SCT clusters on either side of a sensor module or single pixel clusters are then further converted into 3D “space-points”, with position uncertainties determined by the detector geometry and sensor pitch. Below is a schematic diagram of the major components of the inner detector and the types of signals from each.
These space-points are the beginning of the track reconstruction process. This is done in several stages/algorithms, shown in the diagram below, with the “top level” alg SiTrackerSpacePointFinder (lxr,git). The clusterization process is done in PixelClusterization (lxr,git) and SCT clusterization (lxr,git).