In addition to the two default tracking reconstruction passes, inside-out and outside-in, there are additional special passes that are optimized for specific purposes outside of the “standard” ATLAS physics searches. There’s two special pixel-only passes to reconstruct short tracklets, one pass to pick up muons in the forward eta region (|eta| > 2.5) and another to generically reconstruct short tracklets from decaying, short lived charged particles. (e.g, optimized for “disappearing track” searches). In each case, only leftover hits from prior passes are used to limit combinatorial complexity.
An additional “special pass” is Large Radius Tracking, which is (as of Run 3) now performed as part of the default ATLAS tracking reconstruction. The primary track reconstruction procedure does not attempt to reconstruct tracks that have very large transverse impact parameters d0 (in fact, to optimize for execution speed there are tight cuts on transverse impact parameter for default tracking). Long lived particle searches very often require these tracks, so leftover hits from the main reconstruction passes are rerun through a version of the track reconstruction with key parameter requirements strongly relaxed. Most notably, the requirement on d0 is loosened from 5mm to 300mm and z0 from 150mm to 1500mm. This allows reconstruction of displaced tracks at a cost of reduced execution speed.
After all track candidates have been reconstructed, the locations of the underlying pp interactions, vertices, are identified by a dedicated vertex reconstruction procedure. This is very important as generally only one pp interaction in a given bunch crossing is of interest, and its products must be isolated from the “pile-up” occurring nearby. This is done through the adaptive multi vertex fitter (AMVF) Initial vertex locations are estimated with high accuracy using a Gaussian resolution model for the track impact parameter, using the density of tracks along the beam axis to estimate the most likely position of a pp interaction vertex. After a vertex “seed” is found, the set of nearby tracks to fit is chosen – all tracks passing the quality selection are eligible for assignment to new vertex candidates, where tracks can be assigned to multiple vertices with varying weights. Parameters of the assigned tracks are used to fit the position of the vertex candidate with a weighted adaptive Kalman filter. Each time a new vertex candidate is fit, all other candidates linked to it are also simultaneously refit, and the track weights are recalculated. Once a vertex candidate reaches some thresholds of conditions (e.g, must have at least two compatible tracks from the seeding track pool, the fit position may not be within 3σ of any other based on the calculated fit errors of either vertex etc.) it is either accepted or rejected – removing all compatible tracks from the seeding pool, thus reducing the seeding pool in each iteration. Eventually all seeds have been eliminated from the pool and adaptive multi-vertex fitting is complete.
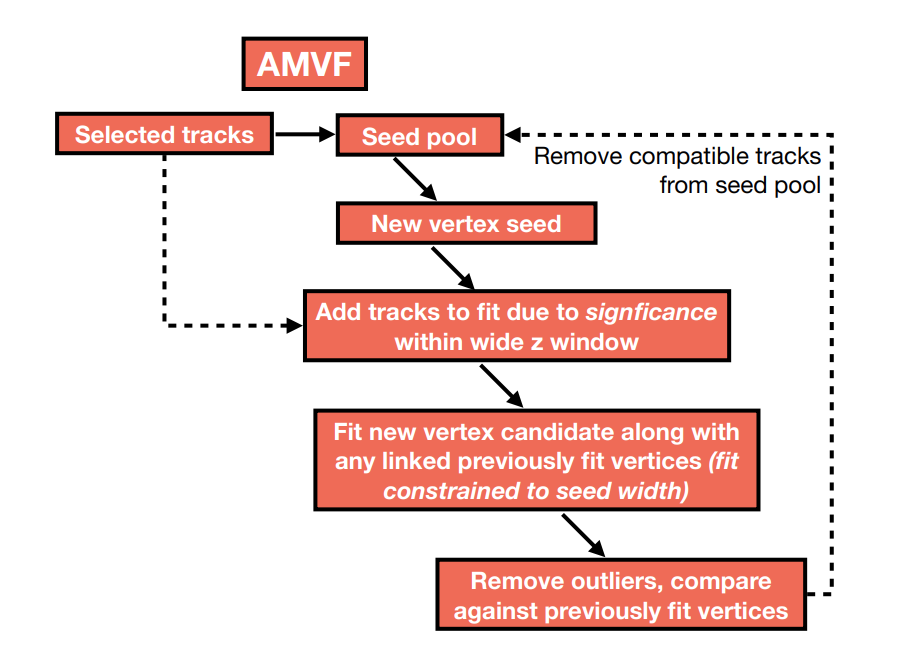
In essence, vertex candidates are allowed to “compete” for tracks in order to reduce the chance of nearby pp interactions being reconstructed as a single merged vertex. For more information, see here This can also be found on git and lxr.
Phew! Hopefully we now understand a bit more about how the ATLAS track reconstruction process works. Now let’s move on to some examples!